
This was a reincarnation of the Orbital Rendersphere persistence of vision globe I built together with a bunch of folks from the Hoboken Makerbar some years earlier. The original POV globe was amazing, but it did have some shortcomings that I wanted to try to improve on. The best and worst thing about the original globe was probably its size - it was unquestionably impressive, but it was difficult to transport and store. It was also not very reliable. Spinning such a large globe at high speeds needed for POV put a fair amount of stress on the mechanical and electrical connections, and it often required a fair amount of tweaking to find and fix loose connections, debug power issues, etc. to make it work.
I later moved to Charlotte, North Carolina, and met the amazing folks at MakerSpace Charlotte. While the Hoboken Makerbar catered primarily to adults, MakerSpace Charlotte was very big on involving kids and families, which I absolutely loved, and getting involved at the makerspace quickly became a huge part of life for me and my family. The founders are big kids at heart, and regularly hosted open houses where kids and adults could make and flying rockets, flying drones, do experiments with liquid nitrogen and superconductors, and all manner of other things.

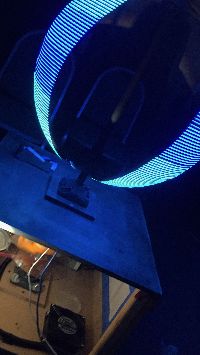
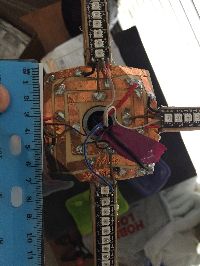
When I shared my thoughts for building a new POV globe, everyone was eager to help, and just like the original Orbital Rendersphere, this became a group project where many people contributed. We designed a smaller globe, but with higher density LED strips so that it had the same resolution as the original. The new design also hides all of the electronics and motor assembly in the base, so there are unobstructed views all the way around the globe. The main axle is supported by bearings in the top and bottom of the base, and a motor in the base drives the axle via a belt. The axle is made from a 1 inch steel pipe for stability, and also to be able to run wiring through its hollow interior. The microcontroller is mounted directly to the axle within the base, and wiring from the microcontroller is threaded through the axle up to the LED strips on the globe's four arms, which were handcrafted from wood. It runs very quietly and smoothly so it can be run indoors without disrupting the environment, and because it is completely self contained it can be transported easily without requiring disassembly and reassembly.
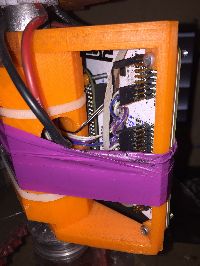
I used a BeagleBone Black microcontroller again for this globe, in order to take advantage of its programmable realtime units (PRUs) and direct memory access input/output capabilities to send timing dependent signals to all of the LED strips on the globe simultaneously and as fast as possible. I decided to completely rewrite the software from scratch this time, in good part because I wanted to really understand how the LED driver software worked, and what better way to do that than to try to reimplement it myself. This took me down a rabbit hole of writing PRU assembly code and a custom linux kernel driver to link it to my userspace display program, which was all far more low level than what I was used to, but was quite educational to learn, and very satisfying when I got it to work.

As before though, I found the journey to be worth more than the result. As pleased as I was with the end product, the real treasure was in the joy of working with others, and in the reactions of those that came to see it - hopefully to have their imaginations kindled, and be inspired to make something even more wonderful themselves.